Pneumatische Parallelgreifer
Robotersysteme
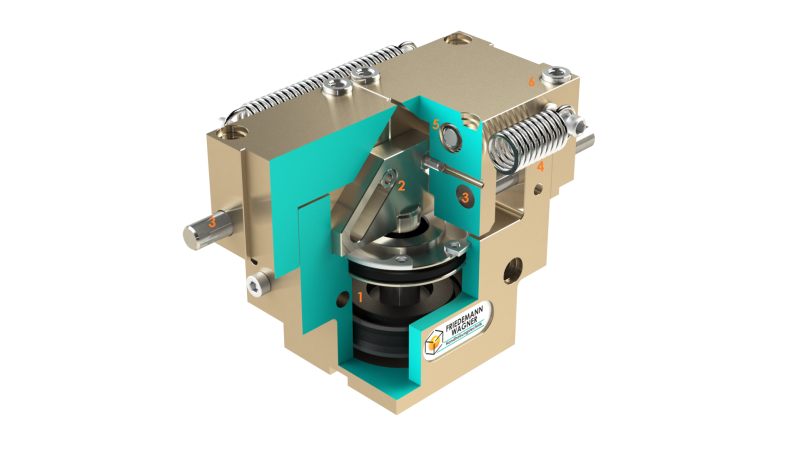
Die Greifer »PGM« von FRIEDEMANN WAGNER sind einfach aufgebaut. Der Kolben (1) überträgt seine Bewegung unmittelbar auf eine Führungskulisse (2).
Neben Schwenken, Drehen und linearen Bewegungen ist das Greifen eine Haupt-Disziplin der Handhabungstechnik. Betrachtet man die immer größer werdende Anzahl an Greifern, die heute für Mensch-Roboter-Kollaboration zur Verfügung stehen, so ist deren Varianz, Funktionalität aber auch Komplexität bemerkenswert. Es gibt elektrische Greifer, hybride Greifansätze – programmierbar und beeinflussbar – und vieles mehr. Was aber ist mit den ganz einfachen Automatisierungsanwendungen – schnelle Wiederholungen für große Stückzahlen? Was ist mit schnellen, stetigen und dauerhaften Anwendungen der Automation? Hierbei muss der Greifer nicht notwendigerweise hochkomplex aufgebaut sein, um zuverlässig, präzise und standfest zu sein. Pneumatische Parallelgreifer der Serie »PGM« der Friedemann Wagner GmbH sind einfach aufgebaut. Der pneumatisch bewegte Kolben (1) ist im Führungselement gelagert und überträgt mittels hartverchromter Kolbenstange seine Bewegung unmittelbar auf eine Führungskulisse (2), das sogenannte Umlenkstück (X45NiCrMo4). Die Spannbacken sind in der zentralen Kulisse zwangsgeführt gelagert: über eine Steigung wird die Bewegung des pneumatischen Kolbens zum Greifen oder Spreizen umgelenkt. Gleichzeitig wird die Kulisse wiederum in einer Nut des jeweiligen Backens geführt. Um Kippmomente aufzunehmen, laufen beide Backen auf geschliffenen und gehärteten, rostfreien Führungswellen (3). Dieses Prinzip des Aufbaus ist kompakt, wartungsfreundlich und führt zwangsläufig zu einem sich stets zentrierenden Greif-System. Durch das offene Prinzip des Greifers kann zwar Schmutz eindringen, aber genauso entweichen. Somit setzt sich der Staub nicht in Führungen ab und führt zu deren Hemmung oder Verstopfung. Zudem läuft die Kolbenstange in einem Dichtabstreifer, der im Führungsdeckel eingebaut ist. Für den späteren Betrieb bedeutet ein offenes System: der Parallelgreifer kann im eingebauten Zustand ausgeblasen und abgeschmiert werden. Langlebigkeit bringt neben der oben beschriebenen Werkstoffwahl der Komponenten das hochfeste, harteloxierte Aluminium von Gehäuse und Backen. Alle Varianten haben Aufnahmen für induktive Sensoren zur Abfrage. Über konstruktiv in die Backen eingebrachte Sackbohrungen kann die Sensitivität der Abfrage so eingestellt werden, dass die Positionen »auf«, »zu« und »gegriffen« quittiert werden können. Varianten des Greifers sind von 2 mm bis 15 mm Hub je Backe verfügbar. Die Wiederholgenauigkeit liegt bei +/- 0,02 mm. Das maximal empfohlene Werkstückgewicht liegt, verteilt über die Baugrößen, kraftschlüssig bei 0,13 kg bis 7,2 kg (Kolbendurchmesser 10 bis 63 mm). Die Länge über beide geschlossene Backen beträgt beim kleinsten Greifer 29 mm (»PGM«-29), bei der Variante -140 somit 140 mm. Technische Daten gelten bei 6 bar Druck, wobei der Einsatz zwischen 2 und 8 bar möglich ist. Alle Greifer werden mit sechs Zentrierringen ausgeliefert. Diese h6-Passungen dienen paarweise (diagonal) zur Montage der Finger und des Greifer-Gehäuses.


