Automatisierte Oberflächenbearbeitung
Anlagen, Maschinen und Geräte zur Oberflächenbearbeitung
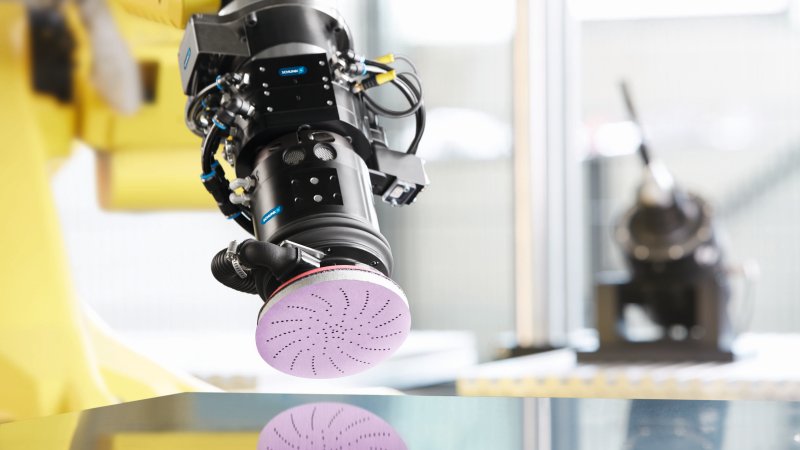
Die neuen Bearbeitungswerkzeuge sorgen in automatisierten Verfahren für eine bestmögliche Oberflächenqualität (Bild: Schunk).
Manuelles Polieren, Schleifen und Bürsten ist anstrengend und mit hohem Aufwand verbunden. Automatisierte Verfahren sind eine Alternative, denn mithilfe eines Roboters lassen sich makellose Ergebnisse erzielen – bei gleichzeitig reduziertem Zeit- und Kostenaufwand sowie geringeren Arbeitsplatzrisiken. Mit neuen Werkzeugen für die robotergestützte Oberflächenbearbeitung von Schunk soll sich die Umstellung auf die automatisierte Oberflächenbearbeitung leicht und mühelos realisieren lassen.
Werkzeuge für automatisierte Bearbeitung
Der Exzenterschleifer »AOV« wurde für das Schleifen und Polieren von Werkstückoberflächen entwickelt. Die pneumatische Einheit wird von einem Lamellenmotor mit einer maximalen Drehzahl von 10.000 U/min angetrieben. Die axiale Lagerung des Motors stellt bei Bedarf Nachgiebigkeit sicher, sodass an der Werkstückoberfläche konstante Anpresskräfte wirken. Selbst bei zunächst sehr unebenen Oberflächen sollen somit bestmögliche Polier- und Schleifergebnisse erzielbar sein. Über zwei Luftanschlüsse lässt sich die Anpresskraft in zwei Richtungen, d. h. beim Ein- und Ausfahren, separat ansteuern und je nach Bedarf von 6,7 bis 67 N variieren. Dadurch ist sichergestellt, dass auch bei Anwendungen über Kopf mit einer konstanten Anpresskraft gearbeitet wird. Der Exzenterschleifer kann wahlweise mit Schleiftellern in Durchmesser 125 oder 150 mm bestückt werden.
Für das Polieren und Bürsten von Werkstücken mit axialer Nachgiebigkeit wurde die Polierspindel »MFT-R« entwickelt. Die Spindel ist mit einem pneumatischen Lamellenmotor ausgestattet, der eine maximale Drehzahl von bis zu 5600 U/min leistet. Für eine Finalisierung der Oberflächen lässt sich die Drehzahl auf ein Minimum verringern. Der robuste Motor läuft nur kurz nach und reduziert dadurch die Bearbeitungszeit. Durch die kardanische Lagerung sind die Ausgleichskraft und die radiale Nachgiebigkeit des Werkzeugs individuell einstellbar. Je nach Druckeinstellung lässt sich die Nachgiebigkeit von 9 bis 70 N regulieren. Die Spindel ist als stationäre Einheit erhältlich oder kann flexibel axial oder radial am Roboter montiert werden.
Schmelzegrün 7
D-77709 Wolfach
07834 866-0
info@supfina.com
www.supfina.com


